

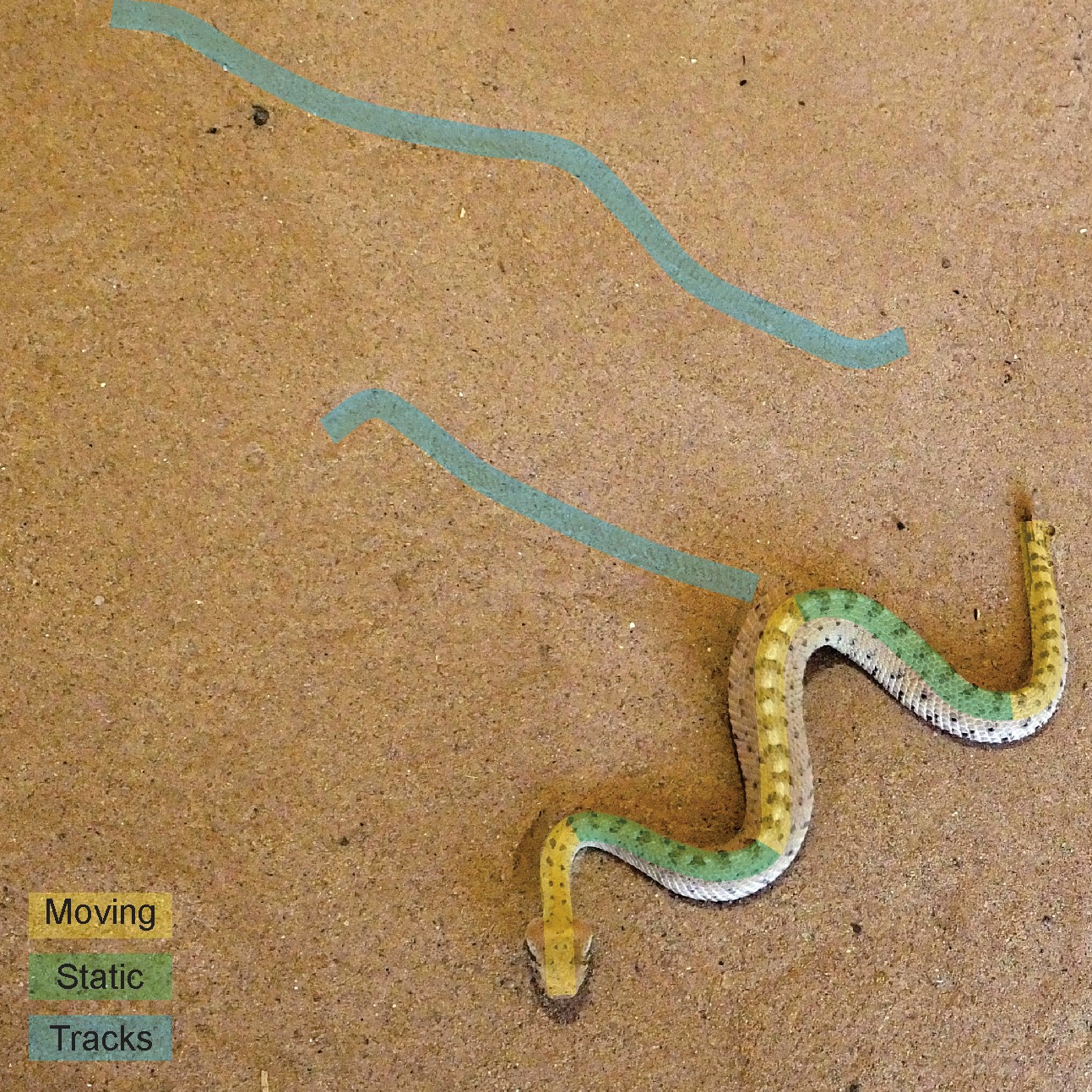
Image: Progression of the S-start in a young yellow anaconda. Credits: Authors of the study. Charles, N., Chelakkot, R., Gazzola, M. et al. Topological dynamics of rapid non-planar gaits in slithering snakes. Nat. Phys. 21, 856–860 (2025).
From mesmerising slithers and smooth gliding to powerful constrictions and strange wiggles, limbless animals, like snakes and worms, have evolved a variety of ways to navigate the world. Snakes, undoubtedly the most iconic of the group, have especially displayed extraordinary versatility in their movements, able to climb, crawl, and even glide. Snake movements have been broadly categorised into three types: the straight-line rectilinear crawl, the wavy undulatory motion, and the distinctive sidewinding often seen in deserts. However, not all snake movements fit neatly into these categories, and it’s becoming clear that this traditional list doesn't cover all the tricks snakes have up their sleeves.
In one such recent event, researchers from the University of Massachusetts Lowell and Washburn University in the USA were studying newborn Yellow Anacondas when they noticed a never-before-recorded movement by the snake, called an S-start.
“Whenever the snakes were handled or approached during the experiments, they consistently employed a non-planar, transient locomotion to move away from the researcher”, explains Prof Raghunath Chelakkot, an associate professor at the Indian Institute of Technology (IIT) Bombay, who was part of the team that studied this new snake movement.
Simply put, the snake raises its head slightly and coils itself into an ’S’ shape. This S-curve then travels along the snake to its tail, straightening the snake. This movement of the S curve, in turn, propels the snake forward, away from the approaching perceived danger.
“We call it an `escape gait’ as lifting the body is not energetically optimal for snakes, and this locomotion aims to get away from harm's way as quickly as possible,” adds Prof Chelakkot.
The S-start is referred to as a transient motion, meaning the snake cannot utilise it for continuous movement. Once it lands, the snake must reload the S spring to repeat the energy-consuming process until it has covered a safe distance.
To study this new motion, Prof. L. Mahadevan from Harvard University, USA, along with Prof. Chelakkot from IIT Bombay, Dr. Nicholas Charles, from Harvard University, Prof. Mattia Gazzola from the University of Illinois at Urbana-Champaign, USA, and Prof. Bruce Young from Kirksville College of Osteopathic Medicine, USA, turned to computational modelling. They built a model that treated the snake's body as a flexible, active filament, allowing them to simulate the S-start and determine the underlying physics.
Modelling the squishy organic material of the snake as elastic filaments is a simplification. However, doing so can reveal the forces involved in this complex manoeuvre.
According to Prof Chelakkot, “the primary modelling challenge is to identify the internal force and torque (twisting force) distribution that replicates the complex posture displayed by the snake during locomotion.”
To their surprise, the complex movement was easily replicated with just three localised torque pulses oriented in three directions, travelling along the snake towards the tail.
“The initial posture during the S-start motion is complicated since it involves in-plane (on the floor) and out-of-plane (lifted off the floor) bending of the snake's body. It was a surprise that a relatively simple torque distribution on an elastic filament could reproduce a complicated posture displayed by the snake during locomotion,” remarks Prof Chelakkot about the finding.
The model also allowed them to calculate the weight-to-muscle torque ratio, which shows how heavy the snake can get before it can no longer perform the S-start. This explains why only juvenile yellow anacondas display this escape gait. The snake needs enough muscle strength to lift and twist parts of its body off the ground against gravity, while also generating the necessary force to propel itself. Lighter, more muscular juvenile anacondas possess the ideal combination of body weight and muscle power to achieve this. The model enabled the researchers to map out a phase space – a map showing the conditions, such as body weight and muscle strength, under which the S-start is possible.
Interestingly, when the researchers repeated the S-start motion periodically, it naturally led to another unique type of snake movement, known as sidewinding. Sidewinding motion is primarily observed in desert-dwelling snakes, such as the sidewinder rattlesnake or the horned viper. The natural progression of the escape gait of the Yellow Anacondas into the sidewinding motion might hint at an evolutionary connection.
“The structural similarities between S-start and sidewinding indeed hint at such a possibility. A more recent report on the lasso motion tree-climbing snakes also appears to show a variant of S-start motion. However, further studies need to be done in this direction to make any concrete claims on a common evolutionary pathway,” says Prof Chelakkot.
By identifying and modelling the S-start, researchers are filling the gaps in how we classify and understand the full range of snake locomotion. The work also highlights the importance of studying transient modes, which are quick, temporary movements, such as escape lunges, that are crucial for survival in the wild. Understanding biomechanical secrets of the S-start could also provide blueprints for developing next-generation robots capable of complex, non-planar movements.
Prof. Chelakkot and his team are already examining some of these applications.
“One interesting direction will be extending the elastic filament framework to other types of limbless locomotion and addressing the diversity displayed by the large class of limbless species, such as snakes, worms, etc. The long-term goal is to make precise quantitative predictions using elastic theory, allowing numerical models to be used for synthesising limbless robots,” he concludes.
Funding information:
This research work was funded by NSF grants, The Simons Foundation and The Henri Seydoux Fund (L.M.)





