

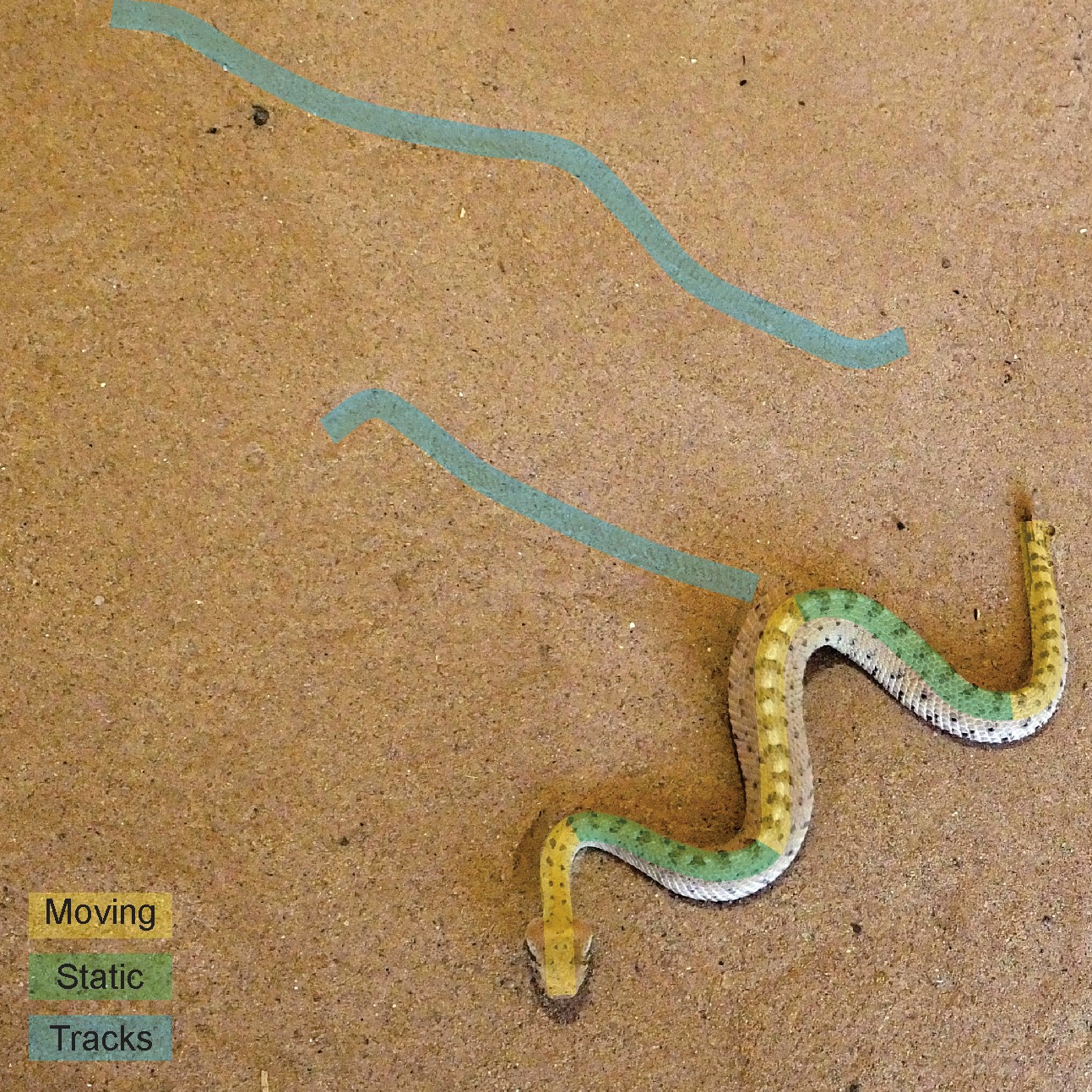
शिशु ॲनाकोंडाच्या S-स्टार्ट गतीचे टप्पे. श्रेय: या अभ्यासाचे लेखक. चार्ल्स एन., चेलक्कोट आर., गझोला एम., आणि इतर. (Topological dynamics of rapid non-planar gaits in slithering snakes. Nat. Phys. 21, 856–860 2025))
अंगहीन, अर्थात हात आणि पाय नसलेल्या साप आणि कृमी यासारख्या प्राण्यांमध्ये मार्गक्रमण करण्यासाठी मोहकपणे सरपटणे, सळसळत पुढे सरकणे, शक्तिशाली आकुंचन आणि अद्भुत वळवळ यासारख्या विविध हालचाली दिसून येतात. विशेषतः साप हालचालींचे अनेक असामान्य पैलू दाखवतात. ते चढू शकतात, सरपटू शकतात, आणि काही साप तरंगू सुद्धा शकतात. सापांच्या हालचालींचे ढोबळमानाने तीन प्रकारात वर्गीकरण केले जाते: सरळ रेषेतील सरपटणे, नागमोडी चाल, आणि वाळवंटात आढळणारी खास साईडवाइंडिंग (बाजूला सरकणे; sidewinding) गती. तरीसुद्धा सापाच्या सर्व हालचाली आणि भ्रमणाचे प्रकार या वर्गीकरणात नेमके बसवता येत नाहीत असे आता स्पष्ट झाले आहे.
अशाच एका कार्यात, अमेरिकेतील मॅसॅच्युसेट्स लॉवेल विद्यापीठ आणि वॉशबर्न विद्यापीठ येथील संशोधकांना नवजात पिवळया ॲनाकोंडाचा अभ्यास करताना ‘S-स्टार्ट’ नावाची पूर्वी कधीही न आढळलेली सापाची एक हालचाल आढळली.
“प्रयोग करताना जेव्हा जेव्हा सापांना हाताळले गेले किंवा कोणी त्यांच्या जवळ गेले तेव्हा तेव्हा साप सातत्याने एक अप्रतलीय क्षणिक हालचाल करत संशोधकांपासून दूर गेले,” भारतीय तंत्रज्ञान संस्था, मुंबईचे (आयआयटी मुंबई) प्रा. रघुनाथ चेलक्कोट यांनी स्पष्ट केले. सापाच्या या नवीन हालचालींचा अभ्यास करणाऱ्या गटाचा ते भाग होते.
सोप्या भाषेत सांगायचे तर साप त्याचे डोके थोडेसे उचलतो आणि इंग्रजी ‘S’ अक्षराच्या आकारात स्वतःचे वेटोळे घालतो. हा ‘S’ वक्राकार सापाच्या शरीरातून त्याच्या शेपटीकडे प्रवास करतो आणि सापाला सरळ करतो. या ‘S’ आकाराच्या हालचालीमुळे साप पुढे जातो आणि जवळ येणाऱ्या संभाव्य धोक्यापासून दूर ढकलला जातो.
“आम्ही याला ‘बचावात्मक चाल’ (escape gait) म्हणतो कारण सापांसाठी शरीर उचलणे ऊर्जेच्या दृष्टीने इष्टतम नाही. आणि या हालचालीचा उद्देश धोक्यापासून लवकरात लवकर पलायन करणे असतो,” प्रा. चेलक्कोट म्हणाले.
S-स्टार्ट ला क्षणिक हालचाल म्हटले जाते कारण साप अशा प्रकारची हालचाल सातत्याने वापरू शकत नाही. साप एकदा जमिनीवर उतरला की सुरक्षित अंतर जाईपर्यंत सापाला ऊर्जा खाणारी S आकारातील उसळी मारायची प्रक्रिया पुनःपुन्हा सुरुवातीपासून चालू करावी लागते.
हार्वड विद्यापीठ, अमेरिका येथील प्रा. एल. महादेवन यांनी आयआयटी मुंबईचे प्रा. चेलक्कोट, हार्वर्ड विद्यापीठाचे डॉ. निकोलस चार्ल्स, युनिव्हर्सिटी ऑफ इलिनॉय ॲट अर्बाना-शॅम्पेन, अमेरिका येथील प्रा. माटिया गझोला आणि कर्क्सविल कॉलेज ऑफ ऑस्टियोपॅथिक मेडिसिन, अमेरिका येथील प्रा. ब्रूस यंग यांच्या बरोबर या नवीन गतीचा अभ्यास करण्यासाठी संगणकीय प्रतिरूप बनवण्याचा मार्ग निवडला. त्यांनी सापाच्या शरीराला लवचिक, सक्रिय तंतू मानून प्रतिमान तयार केले. त्यामुळे त्यांना S-स्टार्ट गतीचे अनुरूपण करता आले आणि त्यामागील भौतिकशास्त्राचा शोध घेता आला.
सापाच्या सहजपणे दाबल्या जाऊ शकणाऱ्या मऊ सेंद्रिय द्रव्यासाठी (squishy organic material) लवचिक तंतूसारखे प्रतिरूप वापरणे म्हणजे खरे तर एक सरलीकरण आहे. सरल केले असले तरीसुद्धा असे करण्याने सापाच्या या क्लिष्ट हालचालींमध्ये समाविष्ट असलेली बले प्रकट करता येऊ शकतात.
प्रा. चेलक्कोट यांच्या मते, “हालचाल करताना सापाच्या शरीराची क्लिष्ट स्थिती(posture) होते. या स्थितीचे प्रतिमान तयार करण्यासाठी आवश्यक अंतर्गत बल आणि टॉर्क (पिळवटणारे बल) यांचे वितरण ओळखणे हे प्राथमिक आव्हान आहे.”
आश्चर्याची गोष्ट अशी की, तीन दिशांना अभिमुख असलेली आणि सापाच्या शेपटीकडे जाणारी फक्त तीन स्थानिक टॉर्क स्पंदने (टॉर्क पल्स) वापरून या क्लिष्ट हालचालीचे अनुकरण सहजपणे करता आले.
“S-स्टार्ट गतीतील सापाची सुरुवातीची स्थिती क्लिष्ट आहे कारण त्यामध्ये सापाचे वक्र शरीर जमिनीवर आणि जमिनीपासून उचललेले देखील असते (प्रतलात आणि प्रतलाबाहेर). हालचाली दरम्यान होणाऱ्या सापाच्या या जटिल अवस्थेचे प्रतिमान लवचिक तंतूवरील त्यामानाने साध्या सोप्या टॉर्क वितरणाने तयार करता आले हे आश्चर्यच म्हणावे लागेल,” प्रा. चेलक्कोट यांनी टिप्पणी केली.
या प्रतिमानाचा उपयोग करून त्यांना वजन:स्नायू टॉर्क असे गुणोत्तर देखील मोजता आले. सापाचे वजन कितपत वाढले असता साप S-स्टार्ट करू शकणार नाही ते या गुणोत्तराने कळू शकते. केवळ अल्पवयीन पिवळे ॲनाकोंडाच ही बचावात्मक S-स्टार्ट पद्धत का वापरतात हे देखील यावरून स्पष्ट होते. सापाला त्याचे शरीर गुरुत्वाकर्षणाच्या विरुद्ध उचलून वळवण्यासाठी पुरेशा स्नायूंच्या शक्तीची गरज असते. तसेच त्याचवेळी स्वतःला पुढे ढकलण्यासाठी आवश्यक असणारे बल उत्पन्न करावे लागते. हे साध्य करण्यासाठी शरीराचे वजन आणि स्नायूंची शक्ती यांची आदर्श जोडी हलक्या पण अधिक स्नायू असलेल्या अल्पवयीन ॲनाकोंडांकडे असते. हे प्रतिमान वापरून संशोधकांनी S-स्टार्ट शक्य होण्यासाठी शरीराचे वजन आणि स्नायूंची शक्ती यासारख्या अवस्थांचे प्रतिचित्र (फेज-स्पेस) तयार केले.
विशेष म्हणजे, जेव्हा संशोधक S-स्टार्ट गतीची कालिक पुनरावृत्ती (पिरियॉडिक रिपीटीशन) करत गेले तेव्हा सापाची एक विशिष्ट साईडवाईंडिंग गती नैसर्गिकपणे प्राप्त झाली (पुढे सरकण्याऐवजी बाजूला सरकणे). साईडवाईंडिंग गती प्रामुख्याने साईडवाईंडर रॅटलस्नेक किंवा हॉर्न्ड वायपर यासारख्या वाळवंटात राहणाऱ्या सापांमध्ये दिसून येते. पिवळ्या ॲनाकोंडाची बचावात्मक चाल नैसर्गिकपणे साईडवाईंडिंग गतीमध्ये रूपांतरित होते यावरून त्यांच्यात उत्क्रांतीच्या दृष्टीने संबंध सूचित होतो.
“S-स्टार्ट आणि साईडवाईंडिंग या गतींमधील संरचनात्मक सारखेपणा खरोखर अशी (उत्क्रांतीच्या संबंधाची) शक्यता सूचित करतो. लॅसो गती वापरून झाडावर चढणाऱ्या सापांवरील एका अलीकडील अहवालानुसार त्यामध्ये सुद्धा S-स्टार्ट गतीचा एक प्रकार आढळतो. तरीसुद्धा, उत्क्रांतीच्या समान मार्गावर काहीही ठोस दावा करण्याआधी त्या दिशेने अधिक अभ्यास करण्याची गरज आहे,” प्रा. चेलक्कोट यांनी सांगितले.
S-स्टार्ट गती ओळखून आणि त्याचे प्रतिरूप बनवून, संशोधक सापाच्या हालचालींच्या सर्व प्रकारांचे वर्गीकरण आणि आकलन याबद्दल आपल्या ज्ञानात भर घालत आहेत. प्राण्यांना जंगलात तग धरण्यासाठी बचावात्मक उडी (escape lunges) सारख्या जलद व क्षणिक हालचाली महत्त्वाच्या असतात. अशा क्षणिक हालचालींच्या अभ्यासाचे महत्त्व या कामामुळे अधोरेखित झाले आहे. S-स्टार्टची जैव-यांत्रिक रहस्ये समजून घेतली तर क्लिष्ट आणि एकाहून अधिक प्रतलात हालचाली करू शकणारे अत्याधुनिक रोबॉट्स विकसित करण्यासाठी मदत होईल.
प्रा. चेलक्कोट आणि त्यांचा गट यापैकी काही विनियोगांचे परीक्षण करत आहेत.
“लवचिक तंतूंवर आधारित प्रतिमानाची पद्धत इतर हात-पाय नसलेल्या प्राण्यांच्या हालचालींसाठी वापरणे आणि साप, कृमी यासारख्या अंगहीन प्राणिसमूहांच्या हालचालींमधील भिन्नता समजून घेणे पुढील अभ्यासाची रोचक दिशा ठरू शकते. लवचिकतेचा सिद्धांत (elastic theory) वापरून अचूक संख्यात्मक अंदाज वर्तवणे, तसेच हात-पाय नसलेल्या रोबॉट्सच्या निर्मितीसाठी संख्यात्मक प्रतिमान (numerical model) वापरता येणे आमचे दीर्घकालीन ध्येय आहे,” त्यांनी पुढील दिशा स्पष्ट केली.
निधीबद्दल माहिती: या संशोधन कार्याला NSF अनुदान, द सायमन्स फाऊंडेशन आणि द हेन्री सीडॉक्स फंड (L. M.) द्वारे निधी लाभला आहे.





