

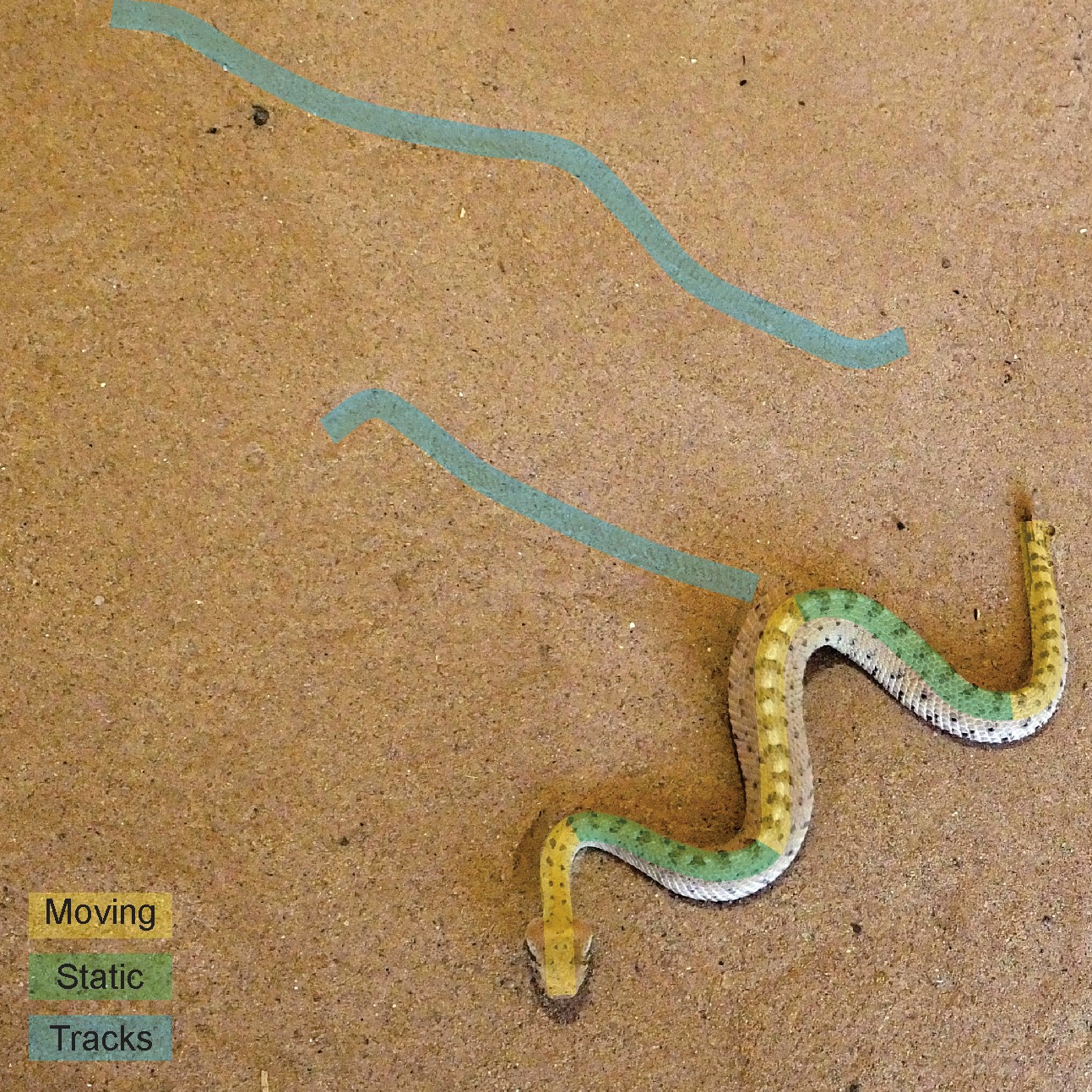
अपनी S-स्टार्ट गति को आकार देता एक युवा पीला एनाकोंडा। श्रेय: अध्ययन के लेखक - चार्ल्स एन, चेलक्कोट आर, गजोला एम एवं अन्य। (Topological dynamics of rapid non-planar gaits in slithering snakes. Nat. Phys. 21, 856–860(2025)
पादहीन अर्थात हाथ पैर विहीन सर्प एवं कीटों (limbless) जैसी प्रजातियों ने निर्बाध एवं सम्मोहक रूप से सरकने (slithers), शक्तियुक्त संकुचन एवं अद्भुत रूप से हिलते-डुलते हुए गति करने की विभिन्न विधियों का विकास किया है। इस समूह में सर्प ही हैं जो आरोहण (क्लाइंब), रेंगने (क्रॉल) तथा फिसलते हुए आगे जाने जैसी विभिन्न असाधारण गतिविधियां करने में सक्षम हैं। सर्पों की गतिविधियों को व्यापक रूप से तीन प्रकारों में वर्गीकृत किया गया है: सीधी रेखा में रेंगना, तरंगमय गति (वेवी अनड्यूलेटरी मोशन) एवं रेगिस्तानों में बहुधा दिखाई देने वाली विशिष्ट साइडवाइंडिंग गति। यद्यपि समस्त प्रकार की सर्प गतियों को इन श्रेणियों में सम्मिलित नहीं किया जा सकता है, तथा यह भी स्पष्ट होता है कि इस पारंपरिक श्रेणी सूची में सर्पों की समस्त सुरक्षा युक्तियाँ सम्मिलित नहीं हैं।
एक घटनाक्रम में, अमेरिका के मैसाचुसेट्स लोवेल विश्वविद्यालय एवं वाशबर्न विश्वविद्यालय के शोधकर्ताओं ने नवजात पीले एनाकोंडा सर्पों का अध्ययन करते समय S-स्टार्ट नामक एक ऐसी सर्प गति को देखा, जो पूर्व में कभी नहीं देखी गई थी।
“परीक्षण के समय जब भी सर्पों को प्रयोग में लाया गया या उनसे संपर्क किया गया, तो वे सदैव एक असमतलीय क्षणिक गति का उपयोग कर शोधकर्ता से दूर चले जाते थे (ट्रांसिएन्ट लोकोमोशन),” भारतीय प्रौद्योगिकी संस्थान (आईआईटी) मुंबई के प्राध्यापक रघुनाथ चेलक्कोट बताते हैं। प्रा. चेलक्कोट सर्प की इस नए प्रकार की गति का अध्ययन करने वाले शोधदल में सम्मिलित थे।
सर्प अपने फन को किंचित उठाकर अंग्रेजी अक्षर 'S' के आकार की कुण्डली बना लेता है। यह S-वक्र सर्प के शरीर के माध्यम से चलते हुए इसकी पुच्छ तक जाता है, जिससे सर्प सीधा हो जाता है। S-वक्र की यह गति सर्प को संभावित संकट से दूर, आगे धकेल देती है।
“हम इसे सुरक्षात्मक गति (एस्केप गैट; escape gait) कहते हैं, क्योंकि सर्प के लिए शरीर को उठाकर रखना ऊर्जा दृष्टिकोण से इष्टतम नहीं है, एवं इस त्वरित गति का उद्देश्य केवल संकट से शीघ्रातिशीघ्र दूर भागना है,” प्रा. चेलक्कोट आगे कहते हैं।
S-स्टार्ट को क्षणिक गति माना जाता है, अर्थात सर्प निरंतर रूप से इस गति का प्रयोग नहीं कर सकता। भूमि पर आते ही सर्प को पुन: S-कुंडली में आना होता है। इस प्रकार सर्प ऊर्जा का उपभोग करने वाली इस प्रक्रिया की पुनरावृत्ति करता है, जब तक कि वह एक सुरक्षित दूरी प्राप्त नहीं कर लेता।
इस नवीन प्रकार की गति का अध्ययन करने हेतु हार्वर्ड विश्वविद्यालय, अमेरिका के प्रा. एल. महादेवन ने आईआईटी मुंबई के प्रा. रघुनाथ चेलक्कोट, हार्वर्ड विश्वविद्यालय के डॉ. निकोलस चार्ल्स, यूनिवर्सिटी ऑफ इलिनोइ एट अर्बाना-शैंपेन, अमेरिका के प्रा. माटिया गज़ोला तथा कर्क्सविल कॉलेज ऑफ ऑस्टियोपैथिक मेडिसिन, अमेरिका के प्रा. ब्रूस यंग के साथ मिलकर कम्प्यूटेशनल मॉडलिंग की ओर ध्यान केंद्रित किया। उन्होंने एक प्रतिरूप निर्मित किया जिसमें सर्प का शरीर एक लचीले, सक्रिय तंतु के रूप में लिया गया, जिससे उन्हें S-स्टार्ट का अनुकरण करने एवं अंतर्निहित भौतिकी को जानने में सहायता मिली।
सर्प के मृदुल जैविक पदार्थ को सरलीकरण द्वारा लचीले तंतु के रूप में प्रतिरूपित किया गया है। यद्यपि इससे सर्प की इस जटिल चाल में सम्मिलित विभिन्न बलों की जानकारी हो सकती है।
प्रा. चेलक्कोट के अनुसार, “आन्तरिक बल एवं आघूर्ण बल (ट्विस्टिंग टॉर्क) के वितरण को पहचानना इस प्रतिरूपण की प्राथमिक चुनौती है। ये बल सर्प की गति के समय उसकी जटिल मुद्रा की पुनरावृत्ति में सहायक होते हैं।”
वैज्ञानिकों के लिए यह आश्चर्यजनक था कि, केवल तीन स्थानगत (लोकलाइज्ड) टॉर्क पल्स के साथ सरलता से इस जटिल चाल की पुनरावृत्ति की जा सकी। तीन दिशाओं में उन्मुख ये आघूर्ण बल (टॉर्क), सर्प के शरीर के माध्यम से पुच्छ की ओर चल रहे थे।
“S-स्टार्ट गति की प्रारंभिक शारीरिक मुद्रा जटिल है क्योंकि इस अवस्था में सर्प का वक्र हुआ शरीर धरातल पर होने के साथ-साथ धरातल से उठा हुआ भी होता है। यह आश्चर्यजनक था कि लचीले तंतु पर अपेक्षाकृत सरल टॉर्क वितरण के द्वारा ही उस जटिल मुद्रा का प्रतिरूपण संभव हो सका, जो सर्प अपनी गति के समय प्रदर्शित करता है,” प्रा. चेलक्कोट ने स्पष्ट किया।
इस प्रतिरूप के माध्यम से वे शरीर के भार एवं मांसपेशी टॉर्क के अनुपात की गणना भी कर सके, जो दिखाता है कि अधिकतम कितना भारी सर्प S-स्टार्ट कर सकता है। इससे स्पष्ट होता है कि केवल युवा पीले एनाकोंडा में ही यह सुरक्षा गति क्यों देखी जाती है। शरीर के कुछ भागों को गुरुत्वाकर्षण के विरुद्ध ऊपर उठाने एवं घुमाने के लिए, सर्प को पर्याप्त मांसपेशियों की शक्ति की आवश्यकता होती है। साथ ही स्वयं को आगे बढ़ाने के लिए भी आवश्यक बल उत्पन्न करना होता है। अल्पभार एवं अधिक मांसपेशियों वाले युवा एनाकोंडा में शरीर के भार तथा मांसपेशियों की शक्ति का आदर्श संयोजन होता है जो इसे आवश्यक बल प्रदान करने में सहायक होता है। इस प्रतिरूप ने शोधकर्ताओं को सर्प की अवस्थाओं के प्रतिचित्रण हेतु सक्षम किया, जो शरीर के भार एवं मांसपेशियों की शक्ति जैसी उन स्थितियों को दर्शाता है, जिनके अंतर्गत S-स्टार्ट गतिविधि संभव है।
एक रुचिकर दृश्य तब सामने आया, जब शोधकर्ताओं द्वारा S-स्टार्ट गति की आवधिक पुनरावृति (पीरिऑडिक रिपीटीशन) की गई। सर्प की लंबाई की दिशा में सहसा होने वाली उसकी गति पार्श्व गति में, अर्थात सर्प की लंबाई की लंबवत दिशा में होने लगी। साइडवाइंडिंग नामक यह गति मुख्य रूप से रेगिस्तान में रहने वाले साइडवाइंडर रैटलस्नेक या हॉर्नड वाइपर जैसे सर्पों में देखी जाती है। पीले एनाकोंडा की सुरक्षात्मक गति का प्राकृतिक रूप से साइडवाइंडिंग गति में परिवर्तित हो जाना विकासवादी (इवोल्यूशनरी) संबंध की ओर एक संकेत हो सकता है।
“S-स्टार्ट एवं साइडवाइंडिंग गति के मध्य संरचनात्मक समानताएं, प्रत्यक्षतः इस संभावना की ओर संकेत भी करती हैं। एक नव्यसा खोज पेड़ पर चढ़ने वाले लासो गति सर्पों में भी S-स्टार्ट गति के एक प्रकार को दर्शाती है। यद्यपि विकासवाद के समान मार्गों पर कोई ठोस प्रतिपादन करने हेतु इस दिशा में अधिक अध्ययन करने की आवश्यकता है,” प्रा. चेलक्कोट का कहना है।
S-स्टार्ट की पहचान एवं प्रतिरूपण कर शोधकर्ता सर्प की समस्त गतियों का वर्गीकरण करने एवं उन्हें समझने की दिशा में आगे बढ़ रहे हैं। यह शोधकार्य सर्पों में क्षणिक गति के प्रकारों (ट्रांसिएन्ट मोड) के अध्ययन के महत्व पर भी प्रकाश डालता है। ये त्वरित एवं अस्थायी गतिविधियाँ हैं, जैसे कि आत्मरक्षा हेतु लगाई गयी छलांग, जो वन्य जीवन संघर्ष के लिए महत्वपूर्ण हैं। S-स्टार्ट के जैवयांत्रिक (बायोमैकेनिकल) रहस्यों को जानकर जटिल एवं असमतलीय (नॉन प्लानर) गतिविधियों में सक्षम आधुनिक रोबोट के विकास का मार्ग प्रशस्त हो सकता है।
प्रा. चेलक्कोट एवं उनका शोधदल पहले ही उपरोक्त में से कुछ अनुप्रयोगों का परीक्षण कर रहे हैं।
“लचीली तंतु संरचना को अन्य प्रकार की पादहीन गतियों तक विस्तार देना एवं सर्प, कीट आदि प्रजातियों के बड़े समूहों के द्वारा प्रदर्शित की जाने वाली गति संबंधी विविधता को संबोधित करना इस शोध क्षेत्र में और अधिक रोचक होगा। लचीलेपन के सिद्धांत (इलास्टिक थिओरी) का उपयोग करके सटीक मात्रात्मक अनुमान लगाना हमारा दीर्घकालिक लक्ष्य है, जिससे संख्यात्मक प्रतिरूपों का उपयोग अंगरहित रोबोटों के निर्माण हेतु किया जा सके,” वे निष्कर्ष निकालते हैं।
वित्तीय सहायता: यह शोधकार्य NSF ग्रांट, दि सायमन्स फाउंडेशन एवं दि हेनरी सीडोक्स फंड (L.M.) द्वारा वित्तपोषित किया गया है।
The summary was edited for better readability. The error is regretted.

 बायें की ओर ऊपरी भाग में पवनचक्की (२) प्रतिमा के मध्य में उपस्थित वाहन (३) छोटा पुल श्रेय: अध्ययन के लेखक")



")